Day2 Schedule
8:00 Conference room open, check-in (bring your name tag from Day1)
8:30 Presentations (presenters should join zoom, mute and deafen their PCs)
- 8:30 Andy Piper・・・Copter Fast Rates
- 9:30 Bill Geyer・・・Copter Analytic Tune Web Tool (30 min)
- 10:00 Sanket Sharma・・・High Altitude Non-GPS
- 10:30 Patrick Pereira・・・MAVLink Tools: Tomorrow’s Solutions for Today’s Problems
- 11:00 Nathaniel Mailhot・・・Example of going from simulation to real flight of protoype plane.
- 11:30 Tim Tuxworth・・・Plane Follow
- 12:00 George Zogopoulos・・・Controller stability analysis
- 12:30 Thomas Watson (lightening talk)・・・ESP32 Status Update
- 13:00 Pieter Van Goor (ANU)・・・CINS (DCM replacement)
11:30 Bento lunch available (eat as you listen to presentations)
15:20 Leave for Kutani Dam
16:00 Demonstrations : Kutani Dam
18:00 Dinner Banquet at Hyakumangoku Hotel
Andy Piper Copter Fast Rates

コプターの制御の高速化。制御原則の概要、最適レート制御、レート要求 レート出力。
特にレース機やフリースタイルで使用されているBetaFlightとの比較とArduPilotの適用。今後、自動化のみならずパイロットの操縦でレスポンスが要求されるシーンでも、ArduPilotの選択の余地が広がると思われる。
Bill Geyer Copter Analytic Tune Web Tool
WEBによる分析調整ツール。理想的な調整とは。最終的に周波数領域を可視化し最適な設定を見つけていく。また、チューニングする際に抑えておきたい理論の紹介があった。
Sanket Sharma High Altitude Non-GPS
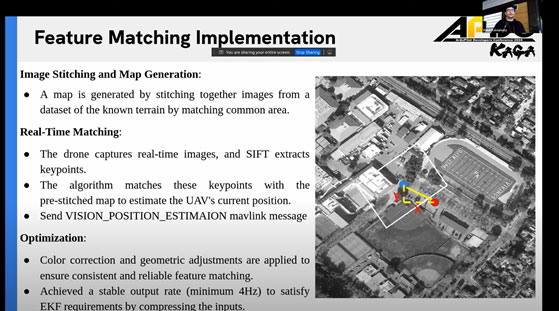
GPSが利用できない場所で、ドローンが飛行できるようにする技術です。ドローンのカメラから得た画像をリアルタイムで分析し、位置を把握する仕組みを持ち、GPS信号を捉えられる場合には自動的にGPSを利用。AIによって大きさや明るさ、距離の変化にも即座に対応し、精度の高い位置決めが簡単に行えるようになってる。
Patrick Pereira MAVLink Tools: Tomorrow’s Solutions for Today’s Problems

MAVLINK用のツールの説明。カメラや様々なツールを使用しているユーザが多い。カメラなどのデバイスを設定できるGUIツールを作成し、複数のカメラを搭載している場合でも簡単に設定できるものとした。また、通信方式もGstreamerやWebRTCにも適用し、様々なプロトコルに対応している。
Nathaniel Mailhot
Example of going from simulation to real flight of prototype plane.
uWSCというプロトタイプ型飛行機を自動飛行を成功させた。 バイクのような重心移動だけで簡単な方向転換することができる。 有人機から取得した航空電子工学のデータなどを参考にし、最適なバランスを備えた動的安定性を実現。今後は、着陸の可能を実現したいと語っていた。
Tim Tuxworth Plane Follow

飛行機の追跡ドローンについて発表。 カメラからの情報を元に追跡するが、飛行機から回転速度等のシグナルを受け取ることで、旋回後の追従をも可能としている。 また、画像の認識におけるタイムラグを考慮することでリアルタイムの追跡を可能としている。
George Zogopoulos Controller stability analysis
非線形制御理論を用いたArduPilot制御システムの安定性検証について発表。TECSの安定性を確認するため、ラプノフ関数やフェーズポートレートを活用してシステムの安定性を解析した結果、特定の数値条件下で安定性が確認できた。
Pieter Van Goor (ANU) CINS (DCM replacement)
補完的慣性航法システム(complementary inertial navigation system)。新しい地理的情報等による慣性システムの情報補完。EKFとCINSとの違い。CINSによるチューニングの紹介。