Day3 Schedule
8:00 Conference room open, check-in (bring your name tag from Day1)
8:30 Presentations (presenters should join zoom, mute and deafen their PCs)
- 8:30 Leonard Hall
- 9:30 Sunohara & Shibuya・・・Indoor Flight
- 10:00 Sotani-san・・・EAMS update
- 10:30 Thomas Watson (lightning talk!)・・・ESP32 Status Update
- 11:00 Matt Kear & Ferruccio Vicari (Remote)・・・Autorotation Flight Mode Update
- 11:30 Rafael Lehmkuhl・・・Cockpit: An intuitive and customizable GCS
- 12:00 Peter Hall・・・Telemetry Dashboard
- 12:30 Ryan Freedman・・・ROS2
- 13:00 Randy Mackay・・・Position Offsets
- 13:30 Bill Geyer・・・System Identification WebTool (30 min)
- 14:00 Peter Hall, Matt Kear・・・Closing remarks
11:30 Bento lunch available (eat as you listen to presentations)
15:00 Demonstrations at Kenko Green Park
17:00 Indoor Demonstrations at Kaga Gymnasium
18:00 Dinner at Izakaya, Soba or Sushi (your choice!)
Leonard Hall Multirotor Basic Stability Tests

限界角度、最大速度およびブレーキ、上昇・下降、スラングペイロード、モーター停止、風の影響など、様々な条件下での飛行挙動の評価など、マルチローター航空機の安定性と性能評価に関する一連のテストについて説明。これらのテストは安全性と信頼性を確保するために設計され、特に重量やペイロードの影響を把握することが重要とした。
Sunohara & Shibuya Indoor Flight
ドローンの室内飛行ソリューションについて、Drone Japan社が開発した「Quick Indoor」が紹介された。「Modal AI」技術を活用したこのドローンは、工場や倉庫でのモニタリングや点検に適しており、振動対策やOptical Flowセンサーとの切り替え機能、精度の向上が施され、2Dマップ上で自律飛行が可能。
Sotani-san EAMS update
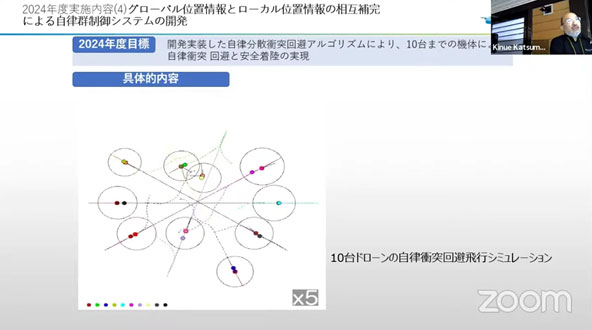
日本のドローンに関する法規制や無人地帯と有人地帯での目視外飛行レベルに触れ、リモートIDの導入やBluetooth/Wi-Fiを使ったドローン間の衝突回避システムも紹介された。日本独自のライセンスと認証要件についても述べ、物流やパトロールでの活用が進む中、衝突回避や安定性の向上を目指したDAシステムの開発が進行中であることが示された。
Thomas Watson (lightning talk!) ESP32 Status Update

M5stack社からESP32-S3搭載のタイニードローンが発売された。ESP32はSTM32に比べて安価で便利なため、ホビー用途にも適しているが、速度やパフォーマンスでの制約のため最適化が必要だった。IMUの更新周期やOSなど様々な問題が発生したが、安定した飛行が可能となった。今後、GPSやコンパスの追加、さらにカスタム構成のアップロード機能などの改善が検討されている。
Matt Kear & Ferruccio Vicari (Remote) Autorotation Flight Mode Update

ヘリコプターのオートローテーション(緊急時の滑空着陸)について解説。エンジンが停止しても安全に降下できるよう、ブレードの角度を調整してエネルギーを管理する技術。各フェーズ(進入、滑空、フレア、着地)の速度や制御方法、そして着地時の衝撃を和らげるためのエネルギー調整を説明。今後の改善には、自動的なエンジン故障検出と安全対策の強化があげられる。
Rafael Lehmkuhl Cockpit: An intuitive and customizable GCS

Blue Roboticsによって開発された新しいグラウンドコントロールステーション「Cockpit」の特徴と機能が紹介された。Cockpitは、完全にウェブベースで、ユーザーのニーズに合わせて高度にカスタマイズ可能なインターフェースを提供。複数のカメラやソナーなどをサポートし、ジョイスティック操作やHTTPリクエストを使った外部デバイスの制御も可能。また、柔軟なデータ入力とデバイス間のシームレスな連携を実現することで、用途に応じた最適な操作環境が構築できる。
Peter Hall Telemetry Dashboard

Webブラウザで利用できるテレメトリダッシュボードのデモを行った。これはGCSではないとのこと。ウィジェットをドラッグ&ドロップで配置して様々な機体情報(センサー値、グラフ、HUDなど)をリアルタイム表示でき、サイズや色が変更できることを実演。オーディエンスからは、ウィジェット位置をロックできるか、チャット形式で機体を操作は可能か、といった質問があった。
Ryan Freedman ROS2

ROS2には自律制御のため便利な機能が多くあるので、それらをArduPilotから簡単に利用できるための対応について説明。ROSを扱う方法としてMAVROSやMAVSDKがあるが、それらだけはではすべて対応できないので個別対応も必要になる。コンパイル、ビルド、制御、ナビゲーション、シミュレーション、ドキュメンテーションといった切り口でArduPilot ROS2対応内容や事例が解説された。また、AP_Geoid、固定翼SmartRTL、AP_ExternalControl、といった対応中の具体的機能についても言及された。
Randy Mackay Position Offsets

Japan Innovation Challengeのデリバリーミッションのために実装された吊り荷の振動を抑制する仕組みについて解説。まず、吊り荷にGPSを搭載し位置情報を取得して機体との差分を計算し、その差分に応じて機体を移動させることにより揺れを抑える。これらはペイロードプレイスミッション実行中など一定条件化でのみ動作し、差分情報は3秒経過するとクリアされる。質疑応答ではペイロードにGPSやタグを付けない方法について質問が挙がり、レナードさんも交えて議論が交わされた。
Bill Geyer System Identification WebTool
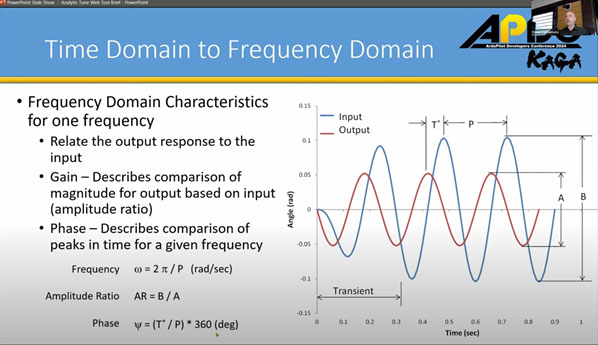
ヘリコプターやマルチローターのチューニングをデスクトップで行う方法について説明。システムIDフライトを実施し、周波数応答を分析することで、理想的なゲイン設定を予測できるツールを紹介。ノイズやフィルタ設定の重要性、特にIMUの影響やハードウェア制約を考慮する必要があることも強調。
Peter Hall, Matt Kear Closing remarks

勝俣氏、ランディ氏、Drone Japanスタッフ、加賀市、スポンサー各社、プレゼン発表者、デモ発表者、会場を提供したホテルに大きな感謝が述べられた。来年のDeveloper Conferenceが9月にUK ヨークシャーで開催されることが発表され、会場が大いに沸いた。